The Proof is Trivial!
Scroll to see replies
Original post by Star-girl
Solution 56
By the t-substitution , the limits get transformed into and since the limits are the same, the integral evaluates to .
By the t-substitution , the limits get transformed into and since the limits are the same, the integral evaluates to .
I get

Original post by Felix Felicis
I get
Seems more plausible than 0. My solution is probably dodgy then... but why?

Original post by Star-girl
Solution 56
By the t-substitution , the limits get transformed into and since the limits are the same, the integral evaluates to .
Seems a bit too quick - maybe this is a little dodgy...
By the t-substitution , the limits get transformed into and since the limits are the same, the integral evaluates to .
Seems a bit too quick - maybe this is a little dodgy...
The integrand is positive over the interval, so it's impossible for the integral to be 0.
Original post by Star-girl
Seems more plausible than 0. My solution is probably dodgy then... but why?
Maybe because of the asymptotes of tan between the limits?
Original post by und
The integrand is positive over the interval, so it's impossible for the integral to be 0.
Original post by Felix Felicis
Maybe because of the asymptotes of tan between the limits?
Ha! What a noobish error I made... I think it's sleepy-time for me...

(edited 11 years ago)
Solution 56
56 Solution
(edited 10 years ago)
Original post by MsDanderson
hey! IF YOU'RE A FEMALE, could you fill this out please? it literally only takes 2mins do it -> http://www.surveymonkey.com/s/B3MVL58
I need 100 done in the next 24 hours or I'll fail my project Please help! I'm so grateful
Please help! I'm so grateful
I need 100 done in the next 24 hours or I'll fail my project
Please help! I'm so gratefulYou come looking for females... in a maths thread?
Original post by und
You come looking for females... in a maths thread?
I only just read that it's for females...I already filled it in
Ah well 
Original post by MsDanderson
it's okay! i appreciate it anyway!
You might want to discard my results anyway...my answers may skew your data for a survey targeted at females to put it lightly
Original post by Star-girlSolution 56
By the t-substitution , the limits get transformed into and since the limits are the same, the integral evaluates to .
Seems a bit too quick - maybe this is a little dodgy...
EDIT: Ignore this rubbish.
By the t-substitution , the limits get transformed into and since the limits are the same, the integral evaluates to .
Seems a bit too quick - maybe this is a little dodgy...
EDIT: Ignore this rubbish.
Can't just sub in t=tan(x/2) as it is not continuous across the range of integration.
Original post by dknt
Well I guess I'll provide another physicsy mathsy problem
Problem 58 **/***
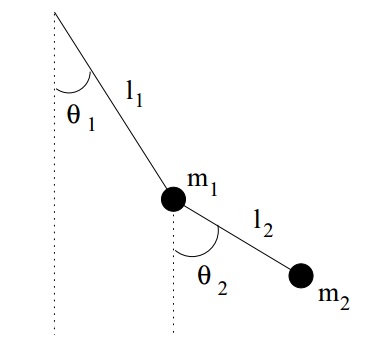
A double pendulum consists of a mass m2 suspended by a rod of length l2 from a mass m1, which is itself suspended by a rod of length l1 from a fixed pivot, as shown below.
Show that the equations of motion for small displacements can be written as
where,
and
Problem 58 **/***
A double pendulum consists of a mass m2 suspended by a rod of length l2 from a mass m1, which is itself suspended by a rod of length l1 from a fixed pivot, as shown below.
Show that the equations of motion for small displacements can be written as
where,
and
Spoiler
Original post by dknt
Spoiler
Spoiler
Original post by bananarama2
I just lost the will to live with that question after I completed a load of school work (binomial expansion). I generally go for energy, but just didn't in that instance, nice one Star-girl (I had to think about that name.)
For some reason I didn't see this yesterday. Ah yes... school work... what I should have been doing this holiday...

Thanks (and haha).

Original post by und
You come looking for females... in a maths thread?
Original post by james22
Can't just sub in t=tan(x/2) as it is not continuous across the range of integration.
Yeah - I realised afterwards, hence the edits...
(edited 11 years ago)
Solution 59
More general:
Denote . This is called binary quadratic form. Its discriminant is defined as .
We say that represents given number properly if there are integers such that and .
We have the following proposition:
Let and be given integers. Then there exists a binary quadratic form of discriminant that represents properly if and only if is solvable.
Let and . Since , we can choose integers such that , , , and . Notice that . Now there are integers such that and . It remains to cite the Chinese remainder theorem.
Conversely, let . Then the form has discriminant and represents properly.
Next, I claim that there is not binary quadratic form of discriminant which represents properly. Since is square-free, we cannot have improper representations.
The congruence is obviously solvable. Consider the congruence . Now . Hence . Therefore the congruence has no solutions and my claim holds true.
More general:
Denote . This is called binary quadratic form. Its discriminant is defined as .
We say that represents given number properly if there are integers such that and .
We have the following proposition:
Let and be given integers. Then there exists a binary quadratic form of discriminant that represents properly if and only if is solvable.
Let and . Since , we can choose integers such that , , , and . Notice that . Now there are integers such that and . It remains to cite the Chinese remainder theorem.
Conversely, let . Then the form has discriminant and represents properly.
Next, I claim that there is not binary quadratic form of discriminant which represents properly. Since is square-free, we cannot have improper representations.
The congruence is obviously solvable. Consider the congruence . Now . Hence . Therefore the congruence has no solutions and my claim holds true.
Solution 58
Ignoring none linear terms.
Ignoring non linear terms.
We have
and
So;
where,
and
Ignoring none linear terms.
Ignoring non linear terms.
We have
and
So;
where,
and
Original post by bananarama2
Solution 58
Ignoring none linear terms.
Ignoring non linear terms.
We have
and
So;
where,
and
Ignoring none linear terms.
Ignoring non linear terms.
We have
and
So;
where,
and
Beaten
 was planning to type this later
was planning to type this later Original post by cpdavis
Beaten was planning to type this later
was planning to type this later Sorry
 Although I think I may have done you a favor, it took and hour and a half to type that.
Although I think I may have done you a favor, it took and hour and a half to type that. 
Quick Reply
Related discussions
- Proof by induction - general question - why prove n=1 works?
- I am the biggest ****** in the world, please remind me ocassionally in case I forget
- Proof question
- BMO 1993, Round 1, Question 3
- Discrete maths questions
- A level maths proof Q
- How should I go about preparing for the STEP Maths exam?
- Range of a function
- PDEs
- AI in robotics PS?
- CV going into Uni
- The hard grade 9 maths questions thread 2023
- How to practice GCSE OCR Computer Science J277 Paper 2?
- Procrastination
- English language paper 2 exam !!
- OCR a level exam question
- Demoivres theorem quick application
- Is there a rule of thumb of when to use integration by parts or substitution?
- Edexcel AS Level Further Maths 2022
- How would the mass at B work in this moments question?
Latest
Last reply 3 minutes ago
Official: Queen's University Belfast A100 2024 Entry ApplicantsLast reply 5 minutes ago
Should I send TMUA to LSE? (Maths, Stats and Business)Last reply 6 minutes ago
year 13 gyg journal : trying not to become an academic victim 🤡📖Last reply 7 minutes ago
Official London School of Economics and Political Science 2024 Applicant ThreadLast reply 11 minutes ago
Official University of Bath Offer Holders Thread for 2024 entryLast reply 11 minutes ago
Edexcel A-level French Paper 3, IRP/Speaking (9FR0 03) - 2024 [Exam Chat]Last reply 14 minutes ago
November 2023 Illegal Migration Intake Unit - Intake Response Team - Immigration OffiLast reply 17 minutes ago
yet to receive a woodhouse interviewLast reply 18 minutes ago
Official University of Sheffield Offer Holders Thread for 2024 entryTrending
Last reply 1 week ago
Edexcel A Level Mathematics Paper 2 unofficial mark scheme correct me if wrongMaths
71
Trending
Last reply 1 week ago
Edexcel A Level Mathematics Paper 2 unofficial mark scheme correct me if wrongMaths
71


